| Tutorials Home | Previous | Next |
|---|---|---|
Writing a program which performs ICP
Overview
The following tutorial will go through the various steps that are performed in a basic ICP registration example. The source code associated with this tutorial can be found in examples/icp_simple.cpp.
Point cloud registration is a critical step in 3D reconstruction of objects and terrains and is used in such varied fields as robotics, medicine, and geography.
In this example we will be performing registration between two point clouds. One is referred to as the reading cloud, and the other the reference cloud. Registration can be more more explicitly defined as finding a rigid geometric transformation that can be applied to the reading cloud such that it is most closely aligned with the reference cloud. Each point in the reading cloud can then be associated to a closest point in the reference cloud. The "closeness" of the alignment is most often quantified using some cost function such as the sum of mean square distances between point associations. The goal is evidently to optimize the alignment and therefore find a rigid transformation which minimizes the cost function.
The ICP algorithm has the following characteristics:
- The algorithm is iterative in which each iteration improves the alignment between reading and reference clouds.
- The non-ideal nature of point clouds leads to the use of data filters and outlier filters. These can be used to remove noisy or redundant points. Data filters can also augment point clouds with additional descriptors which may be useful for registration. A detailed overview of data filters can be found here.
The various components which comprise the ICP registration system are shown in the following diagram.
| Figure 1: High level diagram of an ICP chain |
|---|
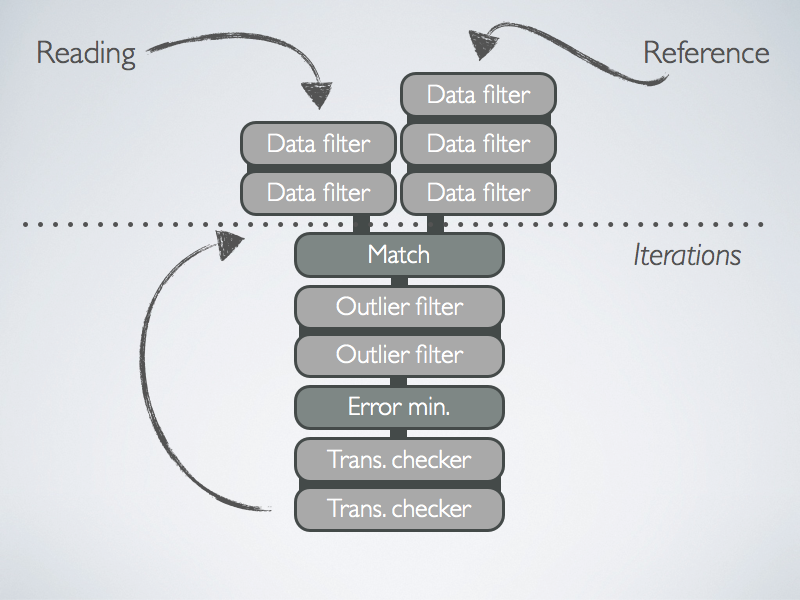 |
Firstly, the reading and reference clouds are processed using a combination of data filters so as to remove noise and augment data-points with descriptive information. The matching step associates each point in the the reading cloud with one in the reference cloud. Statistical outliers are removed by a chain of outlier filters. Subsequently, a transformation is computed by solving the cost minimization step. Transformations are verified to improve alignment at ever iteration and therefore that the process converges towards an optimal transformation.
A Very Simple ICP program
The program contained in icp_simple.cpp performs registration between point clouds using the default settings of libpointmatcher. The point clouds should be encoded in .csv files. Some example point clouds are located in the examples/data/ directory. We will now step through and explain the code.
The validateArgs function is used to ensure that exactly two arguments are supplied: the paths to the reference and reader clouds. Note that the first argument specifies the reference and the second the reader.
void validateArgs(int argc, char *argv[], bool& isCSV )
{
if (argc != 3)
{
cerr << "Wrong number of arguments, usage " << argv[0] << " reference.csv reading.csv" << endl;
cerr << "Will create 3 vtk files for inspection: ./test_ref.vtk, ./test_data_in.vtk and ./test_data_out.vtk" << endl;
cerr << endl << "2D Example:" << endl;
cerr << " " << argv[0] << " ../examples/data/2D_twoBoxes.csv ../examples/data/2D_oneBox.csv" << endl;
cerr << endl << "3D Example:" << endl;
cerr << " " << argv[0] << " ../examples/data/car_cloud400.csv ../examples/data/car_cloud401.csv" << endl;
exit(1);
}
}
The following three lines simply rename types that are used in the program into something more convenient. The PointMatcher base class contains all the relevant objects and functions that are used in the ICP process. The DataPoints class represents a point cloud.
typedef PointMatcher<float> PM;
typedef PM::DataPoints DP;
typedef PM::Parameters Parameters;
We now read the reference and reader from csv files by using the load function, which outputs a DataPoints object.
// Load point clouds
const DP ref(DP::load(argv[1]));
const DP data(DP::load(argv[2]));
The ICP class represents the ICP chain shown in Figure 1. We create an object instantiation of an ICP chain and apply the default settings using setDefault. A view of the default ICP chain configuration is shown here.
// Create the default ICP algorithm
PM::ICP icp;
// See the implementation of setDefault() to create a custom ICP algorithm
icp.setDefault();
The entire registration process is performed by applying the functor TransformationParameters ICP(DataPoints ref, DataPoints data). The optimal transformation is stored in a TransformationParameters object.
// Compute the transformation to express data in ref
PM::TransformationParameters T = icp(data, ref);
We can then apply the obtained transformation to the reading cloud so that it is aligned with the reference. First we create a new DataPoints object to store the aligned reading cloud and then use the apply(DataPoints out, TransformationParameters param) to apply the alignment.
// Transform data to express it in ref
DP data_out(data);
icp.transformations.apply(data_out, T);
In the final step, we save the reference, reading, and aligned reading point clouds to the examples/ directory. Note that the files are saved as .vtk files instead of .csv files so that they can be visualized with ParaView. In the final line, we display the transformation parameters in the console using the << operator on the TransformationParameters object.
// Save files to see the results
ref.save("test_ref.vtk");
data.save("test_data_in.vtk");
data_out.save("test_data_out.vtk");
cout << "Final transformation:" << endl << T << endl;
Car Example
We run the example code with two 3D point clouds representing the same scene from the car dataset in /examples/data/car_cloud400.csv and /examples/data/car_cloud401.csv.
examples/icp_simple ../examples/data/car_cloud400.csv ../examples/data/car_cloud401.csv
The program prints out the transformation matrix obtained by the ICP registration
Final transformation:
0.981598 0.170036 -0.0869051 0.0730435
-0.153273 0.973006 0.17253 0.192502
0.113896 -0.156035 0.981163 -0.0353594
0 0 0 1
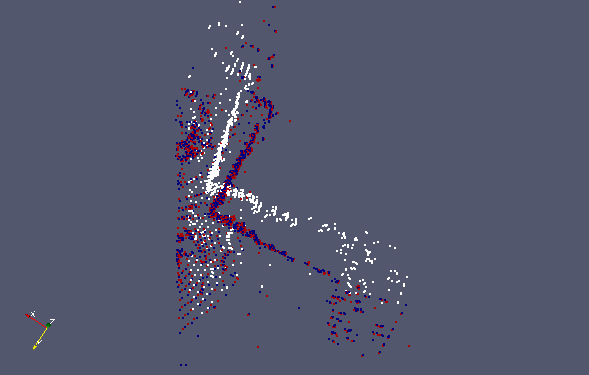
| Figure 2: Visualization of ICP on car example. The white points correspond to the reading cloud, red to the reference, and blue to the aligned reading cloud. |
|---|
 |